Paint Mist
Has no detectable effect on the operation of ultrasonic sensors. However, mist should not settle on the active transducer surface to avoid compromising sensitivity.
Ultrasonic distance and level sensor accuracy is relatively easy to understand, but can be a difficult specification to achieve in a real-world application.
The same principles apply to all ultrasonic level sensors—including Senix ToughSonic® sensors—no matter what is being measured.

Accuracy, or absolute accuracy, is the difference between the output value being measured by the ultrasonic sensor and the actual target distance.
Accuracy specifications are generally determined indoors, in a controlled lab environment, under constant temperature and fixed conditions, and with no interference from wind or air movement.
For example, an ultrasonic water level sensor reading a full-scale range of 12 ft. (or 144 in.) will have an accuracy of ±0.144 in. at ambient temperature and controlled conditions.
The same sensor reading a distance of 75 in. will have an accuracy of ±0.075 in.
This 0.1% detected accuracy is applicable whether the sensor is reading in distance level/volume (gallons).
The specification of accurate ultrasonic measurements depends on several physical parameters:
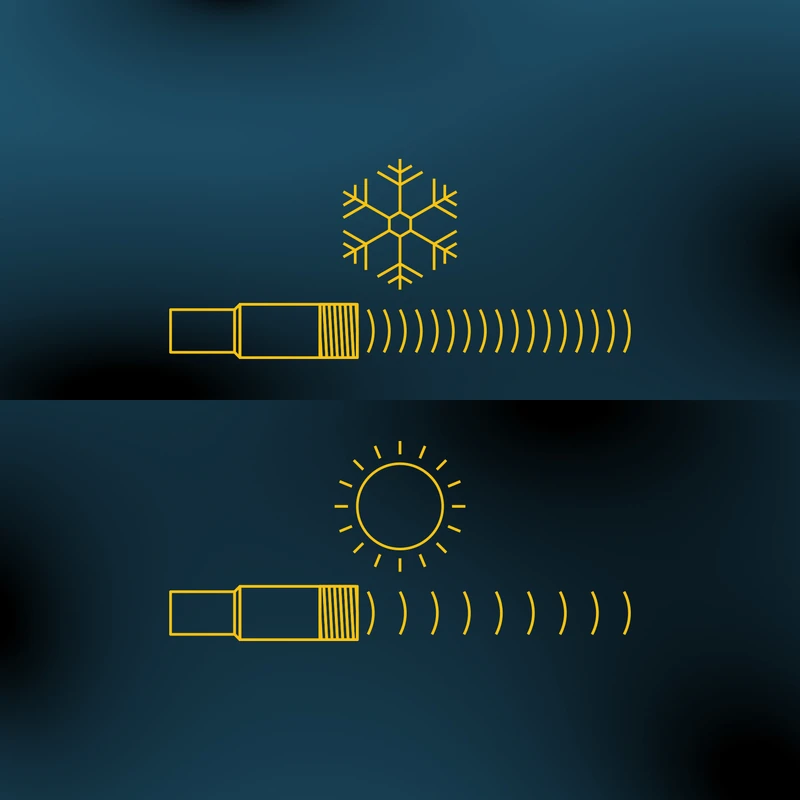
Air temperature has the greatest impact on the measuring accuracy of an ultrasonic sensor. Its fluctuation affects the speed of an ultrasonic sensor’s sound waves.
The speed of sound is about 344 m/s at room temperature, but changes by ~0.17% with each degree Celsius.
As temperature increases, sound waves travel faster. Even though the target has likely not moved or shifted, it will appear that the target is closer according to the measurement.
Without temperature compensation, at a measuring distance of 100 cm, a 20°C change in temperature would cause a measurement error of -8.5 cm at 70°C and +7.65 cm at -25°C.

All ToughSonic ultrasonic sensors have an internal temperature sensor to compensate for air temperature effects.
This internal sensor measures the housing's body temperature to correct the temperature-related measurement distortion.
Internal temperature compensation sensors may be affected by external heating, cooling, or rapid changes in temperature.
Also, the internal temperature may not be identical to the temperature in the actual measurement path.

Humidity has negligible influence on the speed of sound at room temperature and below. However, at higher air temperatures, humidity may increase—and with it, the speed of sound.
On its own, speed of sound decreases by less than 1% between sea level and 9,842 ft (3,000 m) altitude.
Due to an increase in relative humidity, some nitrogen and oxygen molecules in the air are replaced by lighter molecules of water vapor. As a result, the molecular weight of air decreases—ultimately affecting speed of sound.
Atmospheric fluctuations at a specific location—and effects to accuracy—are negligible. However, hurricanes or weather with strong winds or air currents can cause unstable measurements and a loss of signal.
Particularly hot objects can also cause significant air turbulence, which can scatter or deflect ultrasonic waves in such a way that no echo signal is returned.
Paint Mist
Has no detectable effect on the operation of ultrasonic sensors. However, mist should not settle on the active transducer surface to avoid compromising sensitivity.
External Noise
If the source of disturbance has the same frequency as the ultrasonic sensor, external noise may interfere with ultrasonic signal accuracy if its level exceeds the target echoes.
Types of Gas
Sensors operate accurately in atmospheric air, but operations in other gases—i.e: carbon dioxide—can be problematic due to deviations in speed of sound and attenuation.
Tank Configurations
A user must understand their tank dimensions for ideal ultrasonic accuracy. Irregular-shaped tanks can be more difficult to calculate accuracy and capacity.

For extreme changes in air temperature that require an fast response, Senix's Reference Target Temperature Compensation (RTTC) accessory offers an improved compensation option.
The external reference target is positioned in an ultrasonic sensor's measurement path. Combined with SensorView™ software, the sensor takes two readings for each measurement: one to locate the reference target and one to the distant object.
Any change in the speed of sound affects both measurements.
The result is more accurate measurements that are unaffected by air temperature, diurnal temperature swings, or vibration.
Calibration & configuration can be done at any time or temperature.
Generally, specifications like "accuracy" are used to compare one sensor to another.
Published accuracy specifications can be difficult to compare, as some sensors have features to help achieve better accuracy.
The most accurate ultrasonic sensors can achieve 0.1–0.2% of the detected range under perfectly controlled conditions, and most good ultrasonic sensors can generally achieve between 1%–3% accuracy.
When selecting an ultrasonic sensor where accuracy is important, be sure to not only consider its published accuracy specifications, but also if it has built-in temperature compensation controls.
If using the sensor outdoors, see if the manufacturer has an option for temperature compensation, such as a reference target adaptor.