Liquid Level Monitoring
Measure liquid levels in tanks and support flood mitigation efforts with durable sensors

Rugged, reliable level & distance measurements for real-world environments.

Stainless-steel & PVDF ultrasonic sensors engineered for dependable performance in aggressive environments.

Non-contact sensors for waterways, stormwater, and flood-prone infrastructure.

Ultrasonic distance & level sensors trusted in industrial automation and process control.

Ultrasonic distance sensing for water and chemical storage, irrigation, and crop monitoring.
Liquid Level Monitoring
Measure liquid levels in tanks and support flood mitigation efforts with durable sensors
Distance Measurement
Conveyor dimensioning, proximity detection, diameter measurement, and presence/absence detection
Real-Time Visibility
Fast-updating level and distance measurement technologies support continuous data requirements
Smart Automation
Easy integration enables process controls: prevent overfills, activate pumps, or open/close sluice gates

Senix sensors are a durable choice for flood and river level monitoring. Or utilize ultrasonic sensors for responsive tank level measurements in processing and sanitary environments.
Heavy equipment and maritime operations rely on our durable transmitters for distance ranging and obstacle avoidance in nautical, bridge, or road construction sites.





Senix has been a force in ultrasonic level and distance sensors for over 35 years.
No matter your application—municipal wastewater, civil engineering, fertilizer tanks, and everything in between—there's a ToughSonic for every industry.
Versatile. Customizable. Tough. Smart. Connected. Explore the capabilities of Senix sensors today.
Durable & Weatherproof
Rely on IP68-rated sensors for extreme conditions.
High-Precision Sensing
Receive reliable measurements in tough environments.
Easy Integration
Multiple outputs for seamless IoT integration and remote monitoring.
Custom Solutions
Ask us about tailored sensors for unique applications.

Water Monitoring
Explore Solutions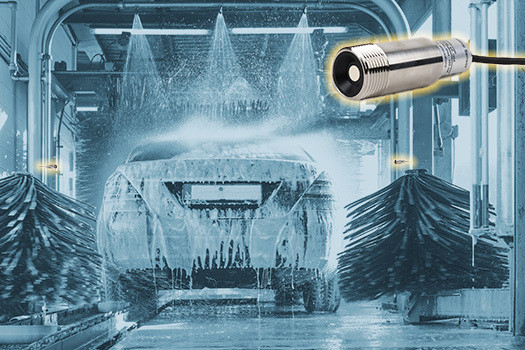
Object Detection
Explore Solutions
Civil Engineering
Explore Solutions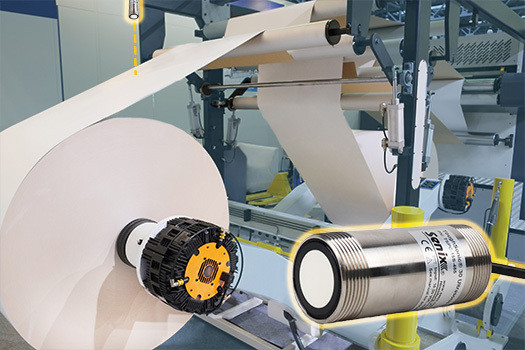
Material Handling
Explore Solutions
Inventory Systems
Explore Solutions
Distance Ranging
Explore Solutions
Tank Level Monitoring
Explore Solutions
Agriculture & Farming
Explore Solutions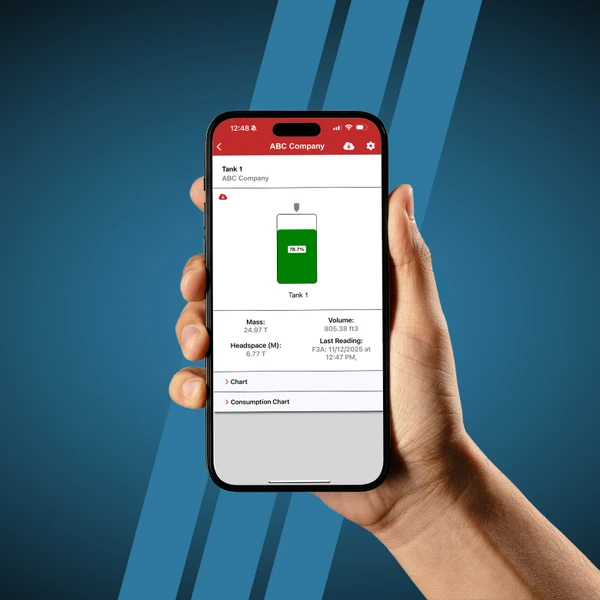
Remote Monitoring
Explore SoftwareMonitor tanks, vats, & other large liquid vessels in one site or several.
Precision farming solutions include irrigation, sprayer automation, & crop height measurement.
Ship & barge distancing, hydrofoil boats, liquid cargo monitoring, and wave profiling.
Monitor river levels and stormwater management during droughts, floods, and tsunamis.
Ensure safer workers and structural integrity during road and bridge construction.

In 2024, Senix became a part of BinMaster Sensors and Technologies LLC—headquartered in Lincoln, Nebraska, USA.

Now more than ever, flood monitoring is crucial. As frequency of flood events increases, the need for smart and efficient detection is needed.
Senix's compact non-contact radar sensors utilize 80 GHz technology for accuracy and precision in harsh conditions. Learn about their functions here.

Several considerations must be made when selecting the right ultrasonic sensor for your application. Have additional questions after reading this article? Senix's experts are here to help!

BraunAbility and Winnebago required a short-range, real-time, accurate ultrasonic sensor for their new accessible RV. Senix was up to the task.


